智能机器人导航系统是一种能够引导机器人自动识别、规避障碍物,并完成有效移动的综合性技术。它融合了计算机视觉、传感器融合、路径规划、运动控制等多个领域的知识,是实现机器人智能化的关键因素。

1. 计算机视觉技术:通过图像处理和模式识别技术,让机器人能够识别和理解周围环境。
2. 传感器融合技术:将不同传感器(如激光雷达、超声波传感器等)的数据进行融合,提高机器人对周围环境的感知能力。
3. 路径规划技术:根据机器人当前的位置和目标位置,规划出一条安全、有效的路径。
4. 运动控制技术:控制机器人的运动,使其能够准确、稳定地执行路径规划的结果。

1. 定位技术:通过GPS、IMU等传感器,确定机器人在空间中的位置。
2. 地图构建:利用传感器数据,构建出机器人的工作环境模型。

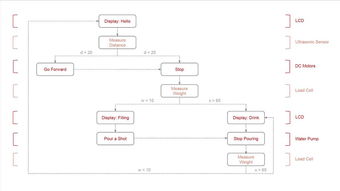
1. 路径规划:根据机器人的当前位置和目标位置,规划出一条安全、有效的路径。
2. 决策制定:根据机器人的感知信息和环境变化,实时调整路径,确保机器人的安全和目标实现。

1. 传感器选择:根据应用需求,选择合适的传感器(如激光雷达、超声波传感器、摄像头等)。
2. 感知技术:通过传感器数据,实现对周围环境的感知和理解。

1. 运动学模型:根据机器人的结构和运动特点,建立运动学模型。
2. 控制算法:设计合适的控制算法,实现机器人运动的精确控制。

1. 深度学习:通过深度学习技术,提高机器人对环境的感知和理解能力。
2. 强化学习:通过强化学习技术,让机器人在实际环境中自我学习和优化路径规划策略。
3. 自然语言处理:通过自然语言处理技术,让机器人能够理解和回应人类的指令,提高人机交互能力。
4. 决策树和Q-learig:使用决策树和Q-learig等机器学习算法,实现更复杂的路径规划和决策制定。
5. 神经网络:利用神经网络模型,实现更高效的数据处理和特征提取,提高机器人的感知和理解能力。
6. 遗传算法和粒子群优化:使用遗传算法和粒子群优化等进化算法,优化路径规划和决策制定的结果。
7. 多智能体系统:通过多智能体系统技术,实现多个机器人之间的协作和学习,提高整体性能。
8. 可视化工具和开源框架:使用可视化工具和开源框架,加速开发和调试过程,提高开发效率。
9. 数据分析和挖掘:通过数据分析和挖掘技术,提取有价值的信息,优化机器人的性能和提高工作效率。