1. 技术背景与研究意义
随着科技的快速发展,机器人技术不断取得新突破,特别是在自主导航技术方面。自主导航技术是实现机器人自主行动的关键,它使机器人能够感知周围环境,自主规划路径,并在复杂环境中进行有效的移动和操作。这种技术在军事、工业、医疗、服务等领域都有广泛的应用,如无人驾驶车辆、无人机、服务型机器人等。实现机器人的自主导航并非易事,它涉及到多个学科的知识,包括机械、电子、计算机科学、控制理论等。因此,对自主导航技术的研究不仅有助于提升机器人的智能化水平,也有助于推动相关领域的发展。
2. 自主导航技术的基本原理和方法
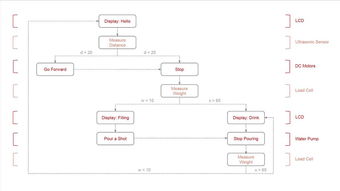
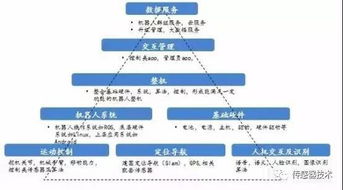
自主导航技术的基本原理是利用各种传感器获取机器人的位置和姿态信息,再通过导航算法和路径规划技术,确定机器人下一步的行动。其中,最重要的部分是传感器和感知技术,它负责收集环境信息,如地形、障碍物等。常用的传感器包括激光雷达、摄像头、超声波传感器等。在获取环境信息后,导航算法和路径规划技术负责处理这些信息,生成一条合适的路径,指导机器人行动。
3. 传感器与感知技术
传感器和感知技术是实现机器人自主导航的关键之一。通过使用激光雷达、摄像头、超声波等传感器,机器人可以获取周围环境的信息,如地形、障碍物等。这些信息被用于构建环境地图,并帮助机器人确定自身在地图中的位置和姿态。基于这些信息,机器人可以规划一条合适的路径,并避开障碍物。感知技术还可以用于识别特定目标,如人或物品,从而实现对特定任务的执行。
4. 导航算法与路径规划
导航算法与路径规划是实现机器人自主导航的关键之二。这些算法负责处理从传感器中获取的环境信息,并根据这些信息规划一条合适的路径。常用的导航算法包括基于图搜索的算法、基于优化算法等。这些算法通过使用人工智能、机器学习等技术来提高路径规划的效率和准确性。在实际应用中,导航算法还需要考虑机器人的运动学约束和动力学特性,以确保机器人的运动平稳且安全。
5. 机器人平台与实验验证
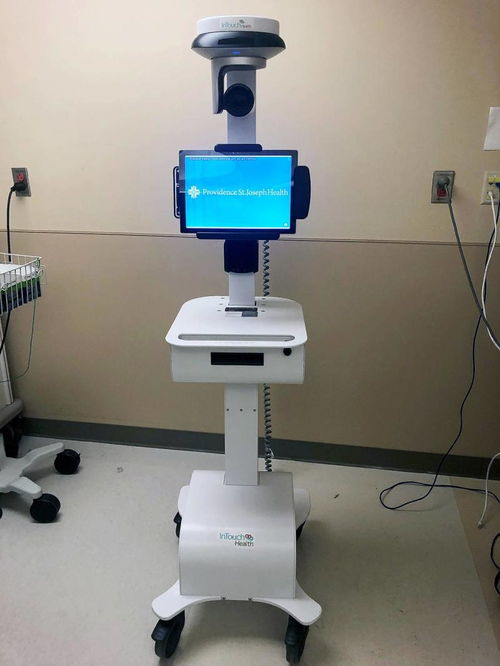
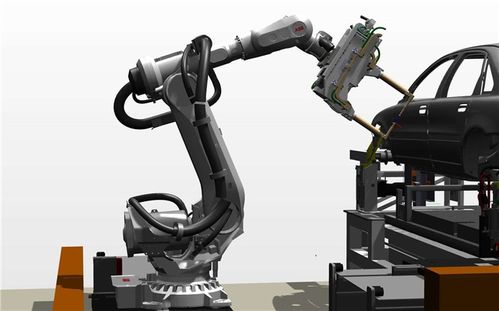
为了验证自主导航技术的有效性,需要建立一个机器人平台进行实验验证。机器人平台需要具备多种传感器和驱动设备,以便在各种环境下进行测试和验证。实验验证包括多种场景,如室内、室外、动态环境等。在这些场景下,机器人的自主导航技术需要能够正确识别环境中的障碍物和目标,并规划一条合适的路径,以实现安全、有效的移动。
6. 实际应用场景与挑战
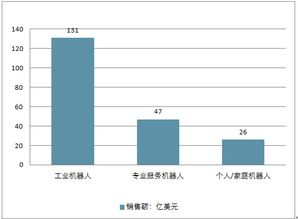
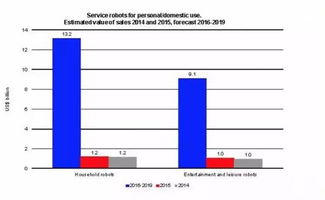
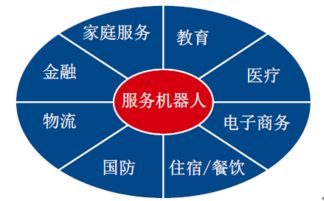
自主导航技术在许多领域都有广泛的应用,如无人驾驶车辆、无人机、服务型机器人等。在无人驾驶车辆方面,自主导航技术可以帮助车辆在复杂的道路环境中进行安全、有效的行驶。在无人机方面,自主导航技术可以帮助无人机在复杂的空域环境中进行飞行和操作。在服务型机器人方面,自主导航技术可以帮助机器人在室内或室外环境中进行自主移动和服务。实际应用中还存在许多挑战和问题,如如何处理复杂的动态环境、如何保证机器人的安全性和可靠性等。
7. 发展趋势与展望
随着人工智能技术的不断发展,自主导航技术也将不断进步和完善。未来,自主导航技术将朝着更智能化、更高效化的方向发展。具体来说,未来的研究将更加注重传感器融合技术和深度学习算法的应用;同时还将更加关注对机器人平台动力学特性的优化和控制;还将积极探索新的导航算法和路径规划策略以应对复杂多变的动态环境。随着科技的不断进步和创新自主导航技术将在更多领域得到广泛应用并为社会带来巨大的经济效益和社会效益。