=============================
1. 引言------
随着科技的快速发展,机器人已经成为了我们日常生活和工作的一部分。自主导航是机器人技术中的一项关键能力,使得机器人在未知或部分已知的环境中能够自主行动。实现机器人的自主导航需要综合运用传感器数据采集、数据处理与环境建模、路径规划与决策制定等多项技术。本文将深入探讨机器人自主导航的实现过程。
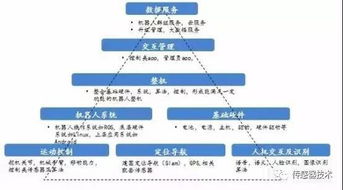
2. 系统架构--------
机器人自主导航系统的架构通常包括感知层、决策层和控制层。感知层负责通过各种传感器采集环境数据,决策层根据采集的数据进行路径规划和决策制定,控制层则负责将决策转化为实际的机器人动作。
3. 传感器数据采集------------
机器人通过各种传感器(如激光雷达、摄像头、超声波传感器等)采集环境数据。这些传感器能够获取关于环境的几何信息(如距离、方向、高度等)以及可能的视觉信息(如纹理、颜色等)。这些数据将用于构建环境的数字模型,并在决策过程中提供关键信息。
4. 数据处理与环境建模--------------
机器人通过数据处理技术对采集的传感器数据进行处理,识别环境中的关键特征,如障碍物、目标点等。同时,基于这些特征,机器人构建环境模型,通常以地图的形式表示。地图可以包含全局地图和局部地图。全局地图提供机器人的全局位置和环境的大致布局,局部地图则提供机器人在其周围环境中的细节。
5. 路径规划与决策制定--------------
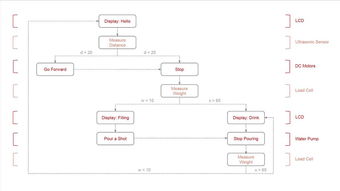
基于环境和地图信息,机器人需要制定合适的路径规划策略。常见的路径规划方法包括基于图的搜索算法(如A算法)、基于行为的方法(如行为树)和基于机器学习的方法(如强化学习)。决策制定则是根据路径规划的结果,确定机器人的具体行动,如前进、后退、转向等。
6. 控制算法实现导航--------------
控制算法负责将决策转化为实际的机器人动作。常用的控制算法包括PID控制、模糊控制、深度学习等。这些算法根据机器人的当前状态和目标路径,计算出机器人应该执行的动作,以实现精确的导航。
7. 实验结果与分析--------------
在实现了上述各个步骤后,我们可以通过实验来验证我们的机器人自主导航系统。实验可以在实际环境中进行,也可以使用模拟环境。我们将通过比较机器人在不同环境下的表现,评估我们的系统的性能和效果。同时,我们也将分析系统的功耗、响应速度、鲁棒性等其他关键指标。
8. 结论与展望------------
通过上述的讨论,我们可以看到实现机器人自主导航需要综合运用多种技术,包括传感器数据采集、数据处理与环境建模、路径规划与决策制定以及控制算法实现导航等。我们已经对每个步骤进行了详细的解析,并展示了实验结果和分析。自主导航仍然是一个开放且活跃的研究领域,还有许多未解决的问题和挑战需要我们去探索和解决。例如,如何提高机器人在复杂环境中的适应能力,如何实现更高效的数据处理和管理,以及如何提升机器人的感知和理解能力等。我们期待未来的技术能够克服这些挑战,推动机器人自主导航技术的发展,从而为我们的生活和工作带来更多的便利和价值。