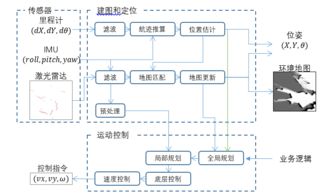

机器人导航技术是实现机器人自主运动的关键技术。它综合运用传感器、控制论、计算机视觉等技术,使机器人能够感知周围环境,并在此基础上进行决策和运动。

机器人定位技术是确定机器人在其环境中的位置。这可以通过各种传感器(如超声波、激光雷达等)以及定位算法(如粒子滤波器、卡尔曼滤波器等)来实现。

机器人地图构建是利用传感器收集数据,并通过算法将数据转化为可用于导航的地图。这包括3D地图构建和2D地图构建。

机器人路径规划是在给定起点和终点的情况下,寻找一条最佳路径。这需要考虑机器人运动学限制、环境障碍物等因素。

传感器在机器人的感知和决策过程中起着关键作用。它们可以检测环境特征,如物体位置、距离和方向,为机器人导航和定位提供必要的信息。

机器人导航算法是用于指导机器人在环境中移动的算法。它们根据机器人的当前位置和目标位置,以及环境信息,计算出最佳运动路径。

定位误差是影响机器人导航精度的关键因素。对定位误差的分析可以帮助我们了解机器人的定位性能,并优化定位算法。

随着技术的不断进步,机器人导航和定位技术也在不断发展。未来,我们将看到更精确、更高效的导航和定位系统,这将使机器人在更多领域得到应用,如家庭服务、医疗护理、公共安全等。同时,随着5G、云计算、物联网等技术的发展,机器人的感知和决策能力将得到进一步提升,实现更高级别的自主导航和定位。