1. 避障技术概述
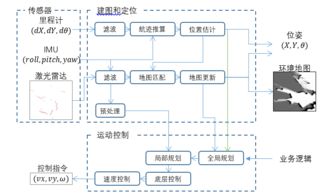
避障技术是机器人导航和路径规划中的重要组成部分,它帮助机器人在环境中避免碰撞和障碍物。避障技术主要依赖于传感器来感知环境,并通过算法对传感器数据进行处理,以确定最佳的路径。
2. 传感器选择与配置
传感器在避障技术中起着关键作用。常见的传感器包括超声波传感器、激光雷达、摄像头等。这些传感器可以提供关于环境的信息,如距离、方向和形状。在选择传感器时,需要考虑其精度、分辨率、探测范围以及成本等因素。对于避障任务,通常需要配置多个传感器以获取全面的环境信息。
3. 避障策略及算法
避障策略和算法是避障技术的核心。常见的避障算法包括基于几何的算法、基于概率的算法和基于机器学习的算法。基于几何的算法主要依赖于环境的几何特征进行路径规划;基于概率的算法则基于概率模型对传感器数据进行处理;基于机器学习的算法则利用机器学习算法对数据进行训练,以预测最佳路径。
4. 机器学习在避障中的应用
机器学习为避障技术提供了新的解决方案。使用深度学习等方法,可以使机器人更好地学习和识别环境特征,并自动调整其行为以避免障碍物。强化学习等方法还可以使机器人通过自我学习和经验积累,不断提高避障能力。
5. 实时避障与路径规划
实时避障是指在机器人运动过程中,实时感知环境并调整路径以避免障碍物。这需要高效的路径规划算法和强大的计算能力。还需要考虑动态环境中的不确定因素,如移动的物体和突然出现的障碍物。对于这些情况,需要使用预测模型和动态规划等方法来提高机器人的应对能力。
6. 避障技术的实践与挑战
在实践中,避障技术面临着许多挑战。例如,传感器的精度和稳定性可能会受到环境因素的影响,如光照、距离和湿度等。复杂的动态环境和多变的目标也增加了避障的难度。为了解决这些问题,需要不断优化算法和提高传感器的性能。
7. 未来发展趋势与展望
随着技术的不断发展,避障技术也将迎来更多的创新和发展。例如,更高精度的传感器、更高效的算法和更强大的计算能力都将为避障技术的发展提供支持。随着人工智能和机器学习的不断发展,未来的避障系统也将更加智能化和自主化。
8. 结论
避障技术是机器人导航和路径规划中的重要组成部分,它帮助机器人在环境中避免碰撞和障碍物。为了实现高效的避障,需要选择合适的传感器、采用有效的避障策略和算法以及利用机器学习等技术。虽然当前避障技术已经取得了一定的进展,但仍需要不断优化和创新以适应复杂多变的环境和任务需求。