机器人导航系统是机器人自主行动的核心组件,主要负责机器人的定位、地图构建、路径规划以及行动控制等功能。一个完整的机器人导航系统需要硬件和软件的协同工作,以实现机器人在复杂环境中的独立运作。
定位技术是机器人导航系统的核心,它决定了机器人的空间位置信息。一般采用全球定位系统(GPS)或惯性测量单元(IMU)进行定位。GPS在室外环境精度较高,但室内环境由于信号遮挡效果较差。IMU则是在室内环境表现较好,但在室外环境由于无法接收到地球的重力场信息,精度会受到较大影响。
地图构建是机器人导航系统中至关重要的一环,它通过机器人的感知系统获取环境信息,并使用算法将获取的环境信息转化为可在机器人行动中使用的地图。地图构建一般使用SLAM(同时定位与地图构建)算法实现。
路径规划是机器人导航系统中的另一个重要组成部分,它的主要任务是在已知地图和机器人当前位置的情况下,找到一条从起始点到目标点的最优路径。常用的路径规划算法包括A、Dijksra等。
传感器在机器人导航系统中扮演着重要的角色,它们帮助机器人感知环境信息,如障碍物、地形等。常用的传感器包括激光雷达、摄像头、超声波传感器等。

运动控制是实现机器人导航的关键环节,它通过控制机器人的电机和舵机,使机器人按照预定的路径和速度进行移动。运动控制需要考虑机器人的动力学特性,以确保机器人的稳定性和准确性。
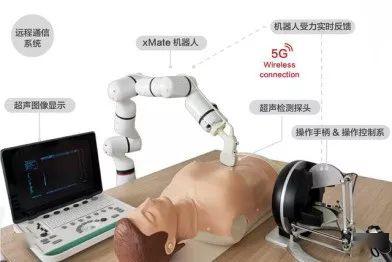
通讯技术是实现机器人导航的另一个关键环节,它负责机器人间以及机器人与外部控制系统的信息交换。一般采用无线通讯技术,如Wi-Fi、蓝牙等。通讯协议的选择应根据实际应用场景来决定,例如需要高传输速率的应用可以选择TCP/IP协议,需要低延迟的应用可以选择UDP协议。
在完成以上所有组件之后,需要对整个导航系统进行集成和测试。集成过程需要注意各个组件之间的接口和数据传输问题,保证系统的稳定性和可靠性。测试过程需要对系统的各项功能进行逐一验证,确保机器人在实际应用中的表现达到预期效果。测试环境应尽可能模拟实际应用场景,以确保测试结果的可靠性。同时,对于测试过程中发现的问题,需要及时进行调整和优化,以提高系统的性能和稳定性。
机器人导航系统是实现机器人自主行动的关键所在。通过深入了解各个组成部分的工作原理和技术细节,我们可以更好地理解和应用机器人导航技术。未来随着人工智能技术的不断发展,机器人导航系统的性能和功能将得到进一步提升和完善。例如,通过引入更先进的传感器和算法,可以实现更精确的定位和地图构建;通过优化路径规划和运动控制算法,可以提高机器人的运动效率和稳定性;通过研究和应用新的通讯技术,可以实现更高效和可靠的信息交换。这些技术的进步和发展将为机器人在各个领域的应用提供更强大的支持和保障。