机器人自主定位导航技术是机器人研究领域的一个重要分支,其目的是让机器人能够在未知或已知环境中自我定位、自我导航,独立执行任务。这种技术集成了计算机视觉、传感器融合、路径规划、运动控制等多个学科的知识,是实现机器人智能化的关键之一。
定位技术是机器人自主定位导航技术的核心组成部分,它通过传感器获取环境信息,经过特定的算法处理后,确定机器人在环境中的位置。常用的定位技术包括GPS定位、惯性导航、激光雷达定位等。其中,GPS定位依赖于卫星信号,在室外环境中精度较高,但在室内或遮挡严重的地方效果较差;惯性导航依靠陀螺仪和加速度计等惯性传感器,能够提供较为准确的姿态信息,但累积误差是其一大问题;激光雷达定位则通过激光雷达扫描环境并建立地图,再通过对比地图信息与实际感知信息来确定机器人的位置。
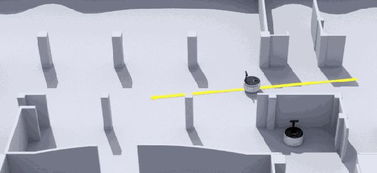
导航技术是机器人自主定位导航技术的另一个重要组成部分,它通过预测机器人的未来位置,为其规划出一条从起点到终点的最优路径。常用的导航技术包括基于规则的导航、基于路径规划的导航和混合导航等。基于规则的导航依靠预先设定的规则来控制机器人运动,如“左拐”、“直行”等;基于路径规划的导航则通过特定的算法为机器人寻找最优路径;混合导航则是将以上两种导航方式结合起来,以实现更高效的导航。
环境感知与建模是实现机器人自主定位导航技术的关键之一,它通过传感器获取环境信息,并建立环境的模型或地图。常用的环境感知传感器包括激光雷达、摄像头、超声波等。在获取环境信息后,通过特定的算法处理,建立环境的模型或地图,以便于机器人在环境中自我定位和导航。
路径规划与决策是实现机器人自主定位导航技术的另一个关键所在,它根据机器人当前的位置和目标位置,为机器人规划出一条最优的路径。常用的路径规划算法包括Dijksra算法、A算法、RRT算法等。这些算法能够根据机器人的运动约束和环境信息,为机器人规划出一条最优的路径,使其能够快速、安全地到达目标位置。

运动控制与执行是实现机器人自主定位导航技术的最后一个环节,它根据路径规划的结果,控制机器人的运动,使其能够按照规划的路径运动。常用的运动控制算法包括PID控制、模糊控制等。这些算法能够根据机器人的当前位置和目标位置,生成控制信号来控制机器人的运动,使其能够准确地到达目标位置。
虽然机器人自主定位导航技术已经取得了显著的进步,但仍存在一些技术挑战和未来发展的方向。例如:如何提高机器人的定位精度和鲁棒性、如何处理复杂的动态环境和多机器人协同工作的问题、如何提高机器人的智能化程度等。未来,随着人工智能技术的不断发展,相信这些问题会逐渐得到解决。

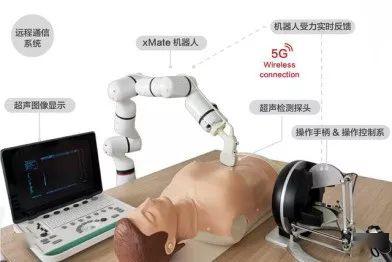
机器人自主定位导航技术的应用场景非常广泛,例如:服务机器人、巡检机器人、军事机器人等。以服务机器人为例,其可以在商场、医院、机场等公共场所代替人类完成一些重复性的工作,提高服务效率和质量。巡检机器人则可以在电力、石油、化工等领域代替人类完成长距离、高风险的巡检工作。军事机器人则可以在战场环境中代替人类完成危险的任务,提高作战效率和安全性。