1. 引言
随着科技的不断发展,机器人技术也在不断创新和进步。自主导航技术作为机器人技术的重要分支,已经成为了机器人研究领域的热点。自主导航技术能够帮助机器人在未知环境中自我寻找路径、躲避障碍物、适应不同的环境条件,从而实现自主运动。本文将详细介绍机器人自主导航技术的相关内容,包括技术背景、系统架构、传感器与感知、路径规划与决策、运动控制与执行、实验结果与评估以及结论与展望等方面。
2. 技术背景
自主导航技术是机器人技术的重要组成部分,它涉及到机器学习、计算机视觉、传感器融合等多个领域的知识。自主导航技术的目的是让机器人能够在未知环境中自我导航,避免障碍物,适应不同的环境条件,从而实现自主运动。自主导航技术被广泛应用于服务机器人、工业机器人、无人驾驶汽车等领域。
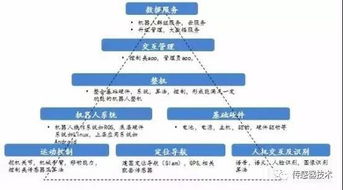
3. 自主导航系统架构
自主导航系统的架构通常包括感知层、决策层和控制层三个层次。感知层负责从传感器中获取环境信息,决策层根据感知层获取的信息进行路径规划和决策,控制层则根据决策结果控制机器人的运动。自主导航系统通过这些层次之间的协作,实现机器人的自主导航。
4. 传感器与感知
传感器是自主导航系统中的重要组成部分,它能够获取环境信息,包括障碍物、地形、颜色等信息。常见的传感器包括激光雷达、摄像头、超声波等。感知层通过对传感器数据的处理和分析,能够识别环境中的障碍物和地形,从而为决策层提供依据。
5. 路径规划与决策
路径规划是自主导航系统中的重要环节,它的目的是让机器人在环境中找到一条安全、高效的路径。路径规划的方法包括基于规则的方法、基于搜索的方法和基于机器学习的方法等。决策层根据感知层获取的环境信息和路径规划的结果,进行决策并生成机器人的行动指令。
6. 运动控制与执行
控制层根据决策层的指令控制机器人的运动,包括速度、方向、姿态等。运动控制的方法包括PID控制、模糊控制、神经网络等。执行器根据控制层的指令驱动机器人运动,实现机器人的自主导航。
7. 实验结果与评估
为了验证自主导航技术的效果,需要进行实验并评估结果。实验通常在模拟环境中进行,包括计算机模拟和实际场地实验。评估指标包括定位精度、避障效果、适应能力等。实验结果表明,自主导航技术能够在不同环境中实现有效的自主导航和避障,具有广泛的应用前景。
8. 结论与展望
本文介绍了机器人自主导航技术的相关内容,包括技术背景、系统架构、传感器与感知、路径规划与决策、运动控制与执行、实验结果与评估以及结论与展望等方面。自主导航技术作为机器人技术的重要组成部分,已经成为了研究的热点。自主导航技术在服务机器人、工业机器人、无人驾驶汽车等领域的应用具有广泛的前景。未来,随着技术的不断进步和应用场景的不断扩展,自主导航技术将会得到更广泛的应用和发展。