
1. 引言
2. 技术背景
3. 系统构成
4. 定位与导航
5. 感知与决策
6. 自主移动
7. 人工智能应用
8. 挑战与未来发展
9. 结论

随着科技的快速发展,机器人技术不断取得新突破,尤其是自主导航技术对于机器人的发展至关重要。自主导航技术能够帮助机器人实现自主定位、导航、感知和决策,从而独立完成任务。本文将详细介绍机器人自主导航技术的各个方面,展望未来的挑战和可能的发展方向。

机器人自主导航技术是指在缺乏人为干预的情况下,机器人能够通过自身的传感器和算法实现自我定位、导航、感知和决策的能力。这种技术依赖于各种传感器(如激光雷达、摄像头、超声波等)和先进的算法(如SLAM、机器学习等)来使机器人能够理解和响应环境信息。

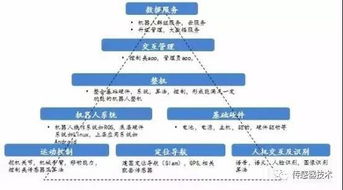
机器人自主导航系统主要由以下几个部分组成:
1. 传感器系统:用于获取周围环境的信息,包括距离、方向、纹理等。
2. 计算平台:用于处理传感器数据,运行各种算法,进行数据分析和决策。
3. 控制系统:用于控制机器人的移动,实现自主导航。
4. 电源系统:提供能源,保证机器人的正常运行。

定位与导航是机器人自主导航技术的核心。定位技术主要依赖于各种传感器(如GPS、IMU、激光雷达等)来获取机器人的位置信息。导航技术则涉及到路径规划和避障等问题,以保证机器人在复杂环境中安全行驶。

感知是机器人理解环境的关键步骤,它依赖于各种传感器(如视觉、雷达等)来获取环境信息。决策则是基于感知信息做出行动的过程,它依赖于人工智能算法(如强化学习、深度学习等)来优化机器人的行为。

自主移动是机器人自主导航技术的最终目标。在未知环境中,机器人需要依靠自身的传感器和算法实现自我导航。这涉及到路径规划、避障、越障等多个方面的问题。同时,自主移动也涉及到机器人的运动控制问题,需要保证机器人的运动平稳性和精度。

随着人工智能技术的不断发展,其在机器人自主导航领域的应用也越来越广泛。例如,深度学习算法可以用于环境识别和路径规划,强化学习算法可以用于自适应控制和优化策略,模糊逻辑和神经网络可以用于控制系统设计和优化等。人工智能的应用使得机器人自主导航技术的实现更加容易和高效。

虽然机器人自主导航技术已经取得了很大的进展,但是仍然存在许多挑战和问题需要解决。例如,如何提高机器人在复杂环境中的适应能力,如何保证机器人的安全性和可靠性,如何降低成本和提高普及率等问题。未来,随着技术的不断发展,相信这些问题会逐渐得到解决,机器人自主导航技术也将迎来更加广阔的发展前景。
机器人自主导航技术是当前研究的热点之一,它对于机器人的发展具有重要的意义。本文从多个方面介绍了机器人自主导航技术的实现方法和应用场景,并指出了当前存在的挑战和未来的发展方向。相信随着技术的不断进步和应用场景的不断扩展,机器人自主导航技术将会发挥越来越重要的作用。