1. 引言
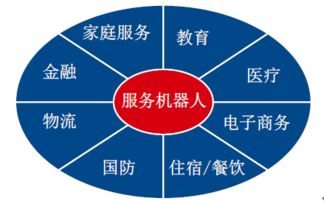
随着科技的快速发展,机器人技术不断取得新突破,其中自主导航技术是实现机器人自主行动的关键。自主导航技术让机器人可以独立地感知环境、进行决策以及行动,从而实现自主的导航。这种技术在家庭服务、医疗护理、农业、物流等领域都有广泛的应用前景。
2. 技术背景
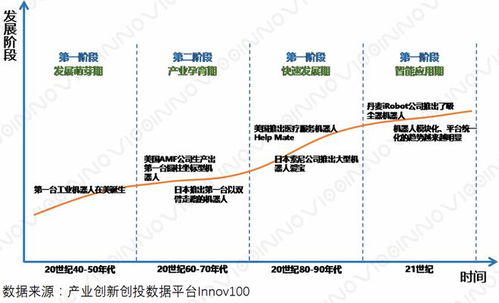
自主导航技术的起源可以追溯到20世纪80年代,随着计算机科学、传感器技术、控制理论等学科的发展,机器人自主导航技术得到了迅速的发展。通过使用各种传感器(如激光雷达、摄像头、超声波传感器等)来感知环境,利用算法和机器学习技术进行路径规划、决策和行动,机器人可以实现在复杂环境中的自主导航。
3. 机器人导航系统
机器人导航系统是实现机器人自主导航的关键部分,它主要包括感知、决策、执行三个环节。感知环节主要依靠各种传感器来获取环境信息,如障碍物、地形等;决策环节是根据感知到的信息进行路径规划,确定机器人的行动方向;执行环节则是通过控制算法实现机器人的运动控制。
4. 自主导航技术
自主导航技术主要包括全局路径规划、局部路径规划和避障技术。全局路径规划是在已知地图的情况下,规划出一条从起点到终点的最优路径。局部路径规划是在局部环境中,根据机器人的当前位置和目标位置,选择合适的行动方向和速度。避障技术则是通过感知环境中的障碍物,实时地调整机器人的行动轨迹,避免碰撞。
5. 传感器与感知
传感器是实现机器人自主导航的关键设备,主要包括激光雷达、摄像头、超声波传感器等。激光雷达可以获取环境的3D信息,摄像头可以获取环境的图像信息,超声波传感器则可以获取距离信息。通过这些传感器获取的环境信息,机器人可以实现对环境的感知和理解。
6. 路径规划与决策
路径规划是自主导航技术的核心环节之一,它是在已知地图或环境信息的情况下,寻找一条从起点到终点的最优路径。决策环节则是根据机器人的当前位置和目标位置,以及环境信息,选择合适的行动方向和速度。常用的路径规划方法包括Dijksra算法、A算法、RRT算法等。
7. 实现与应用
自主导航技术已经在各个领域得到广泛应用,如家庭服务机器人、无人驾驶汽车、无人机等。这些应用都需要机器人能够在复杂的环境中独立地感知、决策和行动,从而实现自主的导航。自主导航技术也在军事、航空航天、工业等领域得到应用,如无人驾驶坦克、无人机快递等。
8. 挑战与未来发展
虽然自主导航技术已经取得了很大的进展,但是在实际应用中仍然存在一些挑战和问题。例如,在复杂的环境中,机器人的感知和理解能力还有限;同时,机器人的运动控制和稳定性也需要进一步提高。未来,随着人工智能、深度学习等技术的发展,自主导航技术将会更加智能化和化,应用范围也将更加广泛。
9. 结论
自主导航技术是机器人技术的核心之一,它使得机器人在未知或复杂的环境中能够独立地感知、决策和行动。随着传感器技术、计算机科学和控制理论的发展,自主导航技术将会更加智能化和化,应用范围也将更加广泛。未来,自主导航技术将会在各个领域发挥更加重要的作用,为人们的生活和工作带来更多的便利和效益。